?? 由 文心大模型 生成的文章摘要

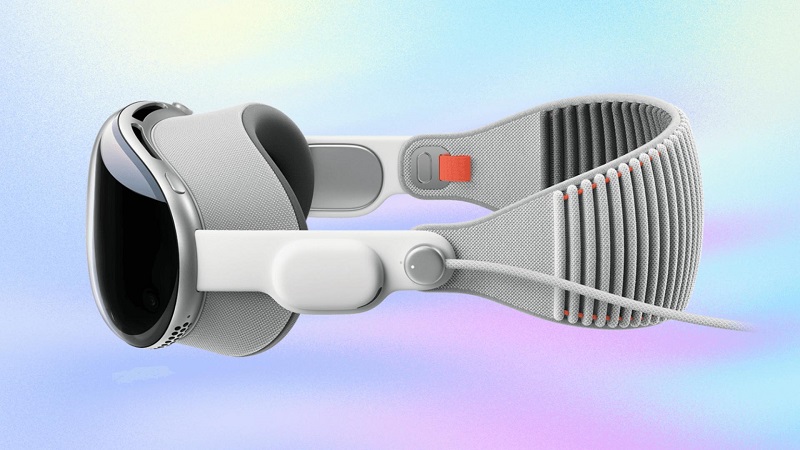
英特爾宣布推出一款立體攝像頭模塊T265售價199美元。它適用于機器人,無人機和頭戴式VR頭顯。
與所有其他RealSense產(chǎn)品不同,T265不是深度傳感器。它包含兩個帶魚眼鏡頭和全局快門傳感器的相機。它還具有包含加速度計和陀螺儀的IMU。板載圖像識別芯片Myriad 2運行英特爾專有的SLAM算法。
同時定位和映射(SLAM)算法是用于基于攝像頭的內(nèi)向外跟蹤的類型。他們通過注意房間內(nèi)獨特的靜態(tài)功能來工作。通過比較來自IMU的旋轉(zhuǎn)和加速度以及這些特征如何移動,可以確定攝像機的位置。
SLAM算法用于Windows MR頭顯,Lenovo Mirage Solo和HTC Vive Focus,以及即將推出的Oculus Quest和Vive Cosmos。
T265大約是USB記憶棒的大小。它的重量僅為55克,僅消耗1.5瓦的功率。這意味著即使像Oculus Go這樣的頭顯的USB端口也可以為其供電。
包含專用圖像處理芯片歸功于英特爾2016年的Movidius。Movidius團隊生產(chǎn)的超低功耗專用圖像處理芯片比硬幣小。Myriad 2也被用于Google Clips等產(chǎn)品。
您可能想知道為什么現(xiàn)有的RealSense Depth相機不適合SLAM。這些攝像機的視野明顯較小,因此無法看到很多房間。T265專為深度數(shù)據(jù)而設(shè)計,此外,由于它們沒有內(nèi)置的Movidius芯片,因此PC或頭顯必須進行圖像處理。
T265的價格和位置跟蹤的廣泛可用性對于業(yè)余愛好項目和硬件原型設(shè)計,即插即用位置跟蹤將是一個有用的解決方案。
【93913原創(chuàng)內(nèi)容,轉(zhuǎn)載請注明及回鏈】