?? 由 文心大模型 生成的文章摘要

14日凌晨1點(diǎn),蘋(píng)果發(fā)布會(huì)如約舉行。iPhone 12 Pro毫無(wú)懸念地升級(jí)了它的攝像頭,并加入了iPad Pro上的那顆激光雷達(dá)。
在iPad Pro剛發(fā)布時(shí),外界有很多不理解的聲音,大部分買了設(shè)備的人更是完全沒(méi)有在意過(guò)激光雷達(dá)。
iPhone 12 Pro激光雷達(dá)介紹
你或許并不了解蘋(píng)果宣傳頁(yè)上的“應(yīng)用于NASA火星登陸任務(wù)的技術(shù)”到底代表了什么,但激光雷達(dá)早就在各個(gè)領(lǐng)域大顯身手:既能測(cè)距、又能建模、甚至還可以測(cè)霧霾……
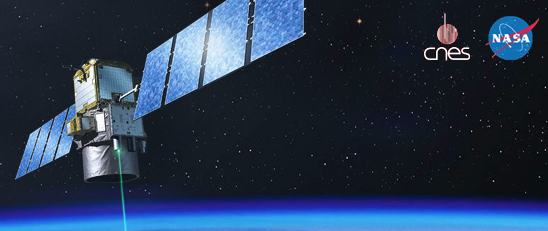
搭載了激光雷達(dá)的CALIPSO衛(wèi)星
一、測(cè)距:可遠(yuǎn)觀,亦可近玩
激光雷達(dá)(LiDAR)的全稱是光探測(cè)和測(cè)距(Light detection and ranging),最主要的能力是對(duì)距離的感知。這也是蘋(píng)果選擇激光雷達(dá)的直接目的——用于增強(qiáng)現(xiàn)實(shí)(Augmented Reality,AR)。
AR技術(shù)在近些年一直被提起,但應(yīng)用一直滯后:如果你用過(guò)蘋(píng)果手機(jī)里的“測(cè)距儀”,一定會(huì)覺(jué)得并不好用。由于之前的機(jī)型使用圖像跟蹤方式識(shí)別物體,光線過(guò)暗、平面顏色變化不大、非平面區(qū)域都會(huì)導(dǎo)致測(cè)距不可用。
無(wú)法檢測(cè)到平面的測(cè)距儀APP
普通攝像頭的傳感器直接接收外部物體的光線從而成像,激光雷達(dá)則是“主動(dòng)探測(cè)”:激光雷達(dá)首先向外發(fā)射激光,激光遇到障礙物后會(huì)反射回來(lái)進(jìn)入傳感器中,通過(guò)計(jì)算激光從發(fā)射到接收的時(shí)間,與光速相乘便可得到距離信息。這有點(diǎn)像小學(xué)學(xué)過(guò)的勻速直線運(yùn)動(dòng)物體的時(shí)間、距離與速度計(jì)算。

激光雷達(dá)工作原理圖
當(dāng)激光雷達(dá)連續(xù)工作時(shí),通過(guò)“掃描”檢測(cè)區(qū)域,就可以快速形成一張“點(diǎn)云”圖——每一個(gè)被掃描的點(diǎn)的距離信息都會(huì)被記錄下來(lái),從而與攝像頭的圖片信息一起合成三維世界的模型。
iPad Pro探測(cè)點(diǎn)云示意圖
激光雷達(dá)也讓拍照技術(shù)提升了一大步:在低光場(chǎng)景下,激光雷達(dá)的主動(dòng)探測(cè)能力可以輔助攝像頭實(shí)現(xiàn)快速自動(dòng)對(duì)焦,并提供更多的深度信息,拍攝極為出色的人像照片。

照片樣張
激光雷達(dá)給AR的應(yīng)用賦予了無(wú)限可能:不僅使得“測(cè)距儀”APP可以發(fā)展成更為好用的三維測(cè)量工具,還可以讓你實(shí)現(xiàn)遠(yuǎn)程口紅試色,或是在自己的客廳里穿梭熱帶雨林。
激光雷達(dá)的應(yīng)用
激光雷達(dá)優(yōu)秀的測(cè)距能力在自動(dòng)駕駛上發(fā)揮到了極致。自動(dòng)駕駛中,車輛對(duì)于周邊環(huán)境的實(shí)時(shí)感知極其重要。
近期百度在北京正式開(kāi)放了自動(dòng)駕駛出租車服務(wù),其中的所有汽車均搭載了激光雷達(dá)。這種機(jī)械旋轉(zhuǎn)式激光雷達(dá)通過(guò)高速旋轉(zhuǎn),可以360度檢測(cè)周邊的環(huán)境。
自動(dòng)駕駛雷達(dá)探測(cè)圖
二、測(cè)繪:細(xì)識(shí)廬山真面目
如果你現(xiàn)在面對(duì)著一望無(wú)際的森林,該怎么統(tǒng)計(jì)整個(gè)區(qū)域的樹(shù)木數(shù)量?
傳統(tǒng)的方法一般使用“樣方調(diào)查”,通過(guò)將實(shí)地采樣調(diào)查后的結(jié)果,推算到整個(gè)區(qū)域進(jìn)行計(jì)算。但有了激光雷達(dá),研究人員將其裝載到飛機(jī)、衛(wèi)星上,通過(guò)探測(cè)垂直距離,快速對(duì)地面上樹(shù)木的高度信息進(jìn)行測(cè)量,構(gòu)建森林地區(qū)的三維視圖。
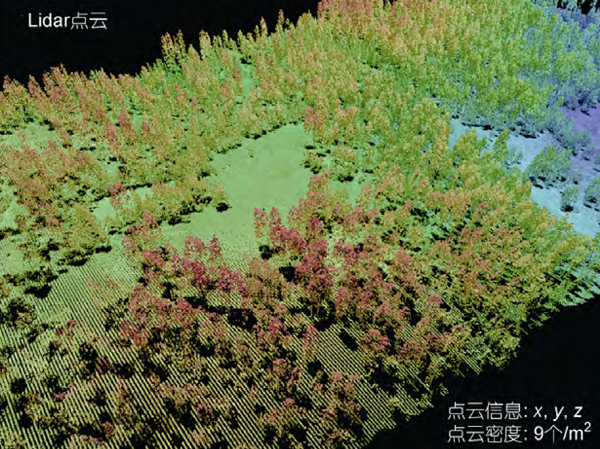
小光斑機(jī)載激光雷達(dá)獲取的植被離散點(diǎn)云示意圖
隨著激光雷達(dá)的分辨率不斷提高,能夠采集到的信息也越來(lái)越多。在森林測(cè)量領(lǐng)域,多維度的激光雷達(dá)不僅可以獲得樹(shù)木高度,還可以獲取更精細(xì)的樹(shù)木形態(tài)學(xué)特征并進(jìn)行樹(shù)木分類。這不僅大大降低了人工與時(shí)間成本,還能獲得更大規(guī)模的數(shù)據(jù)。
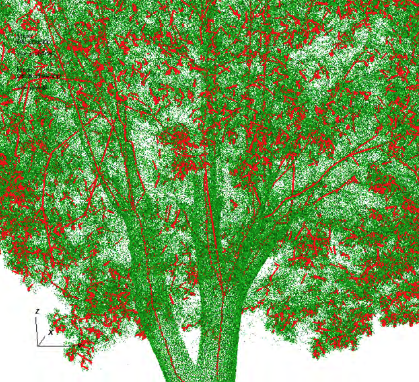
基于T-LiDAR數(shù)據(jù)自動(dòng)提取樹(shù)干、枝葉結(jié)構(gòu)參數(shù)
三、建模:真作假時(shí)假亦真
傳統(tǒng)的建模軟件一般根據(jù)設(shè)計(jì)需求直接在軟件中進(jìn)行模型的構(gòu)建,但對(duì)于更精細(xì)的實(shí)體細(xì)節(jié),往往還需要花更長(zhǎng)的時(shí)間來(lái)調(diào)整參數(shù)。激光雷達(dá)可以直接掃描整個(gè)實(shí)物,直接將物體數(shù)字化,存儲(chǔ)在計(jì)算機(jī)中。
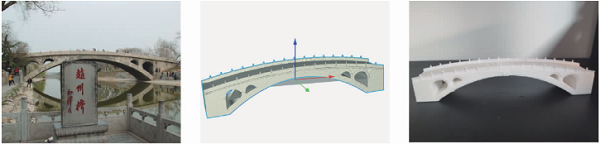
激光雷達(dá)掃描建模
激光雷達(dá)的建模能力,在文物數(shù)字化領(lǐng)域大展身手。只能在博物館里看到一面的文物,如今可以通過(guò)激光雷達(dá)掃描形成三維圖像,更多的細(xì)節(jié)被呈現(xiàn)在觀眾面前。這種非接觸、無(wú)損壞式的記錄將歷史永久地記錄,同時(shí)為文物修復(fù)工作提供了直觀的模型參數(shù),大大降低了文物修復(fù)的難度。
四、霧霾監(jiān)測(cè):霧里看花?一目了然!
上面提到的幾個(gè)應(yīng)用大多都逃不開(kāi)“測(cè)距”這一主要功能,但光本身有這么多的特征信息,僅用來(lái)測(cè)量發(fā)收時(shí)間有些大材小用。
當(dāng)光穿過(guò)一層顆粒物時(shí),不同濃度區(qū)域反射回來(lái)的光信號(hào)強(qiáng)弱也會(huì)有明顯的區(qū)別,再加上接收時(shí)間差距,就可以計(jì)算出不同區(qū)域的顆粒物濃度。
沒(méi)錯(cuò),霧霾也可以用激光雷達(dá)進(jìn)行測(cè)量了。加之以不同的光學(xué)參數(shù)(如波長(zhǎng)、偏振等等)的探測(cè),可以實(shí)現(xiàn)污染物濃度、種類等多個(gè)項(xiàng)目的監(jiān)測(cè)。
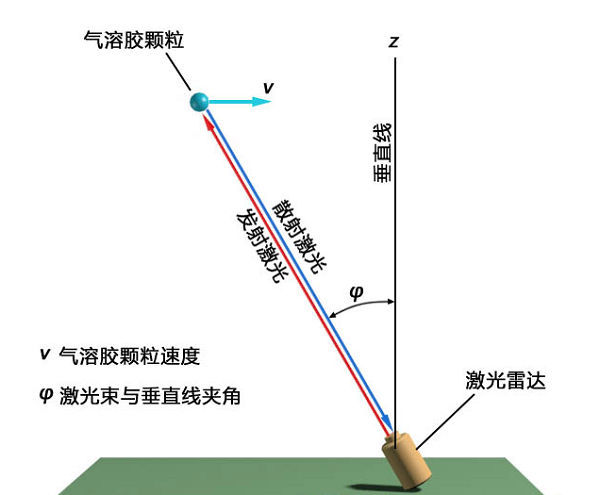
激光雷達(dá)監(jiān)測(cè)霧霾示意圖
傳統(tǒng)的霧霾檢測(cè)手段通常是定點(diǎn)采樣分析,但難以獲得垂直距離上的分層信息。顆粒物激光雷達(dá)的出現(xiàn)使得更大空間尺度的霧霾監(jiān)測(cè)成為現(xiàn)實(shí)。
在環(huán)境領(lǐng)域使用的激光雷達(dá),不僅可以安裝在地面上,還擁有了車載、機(jī)載、星載等多維度探測(cè)的激光雷達(dá)。地面上定點(diǎn)的激光雷達(dá)可以連續(xù)監(jiān)測(cè)固定區(qū)域上空的污染情況,其他幾種則可以通過(guò)移動(dòng)激光雷達(dá),繪制出污染剖面圖,從而找出污染物的傳播途徑。
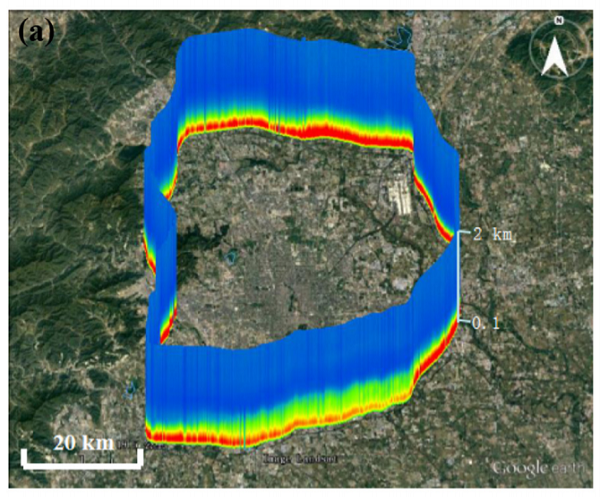
激光雷達(dá)探測(cè)污染剖面
NASA在火星探測(cè)設(shè)備上裝備的激光雷達(dá),也是通過(guò)類似的方法,測(cè)量大氣氣體成分特征,從而尋找新的生命跡象。
蘋(píng)果并沒(méi)有夸大其詞:光本身可以承載太多的信息,激光雷達(dá)作為光探測(cè)的一種重要手段,已經(jīng)被廣泛應(yīng)用在生活和科研領(lǐng)域。但這似乎是第一次出現(xiàn)在手機(jī)上。
移動(dòng)端設(shè)備搭載激光雷達(dá),為今后的AR應(yīng)用提供了更多的可能。iPhone 12 Pro,是一個(gè)新的嘗試,也可能是激光雷達(dá)的另一個(gè)開(kāi)始。